AutoML:訓練模型以識別凹坑
初始算法選擇和超參數(shù)優(yōu)化是我個人不喜歡做的活動。如果你像我一樣,那么也許你會喜歡自動機器學習(Aut....
事件相機定義與設計
沒辦法,event camera 直譯過來就是事件相機,雖然我覺得這個稱呼不太直接,或許翻譯為“微動....
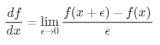
RNN以及LSTM
循環(huán)神經(jīng)網(wǎng)絡(Recurrent Neural Network,RNN)是一種用于處理序列數(shù)據(jù)的神經(jīng)....
激光雷達和相機融合的兩種方法
另外,圖像目標框往往比真實目標大一些,目標邊界框內投影點云可能不屬于真實目標(比如可能屬于背景,或附....
三維點云數(shù)據(jù)的兩種結構Kdtree和Octree
三維點云數(shù)據(jù)用于表征目標表面的海量點集合,但是各個離散點之間并沒有拓撲關系,一般通過建立點云的空間索....
如何使用深度相機實現(xiàn)視覺slam建圖和導航
深度相機也具備普通相機的一些不足,容易受視差影響:包括黑色物體(特征點少)、透明物體(光的穿透)、光....
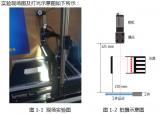
視覺檢測系統(tǒng)泡棉識別和定位
通過打低角度環(huán)光源可以強調邊緣,凸顯與背景的高度對比,暫定視野100*70,單個像素精度為0.05m....
基于深度學習構造DL-SR網(wǎng)絡結構和實現(xiàn)方法
縮放算法,尤其是放大算法,將原先沒有的像素,通過一定的算法計算出來。這些算法常用的有最近鄰域算法,雙....
ISP圖像處理技術的基本框架和校正方法
ISP(Image Signal Processor),即圖像處理,主要作用是對前端圖像傳感器輸出的....
視頻圖像三插值方式的結果
? 在播放視頻時,常遇到視頻尺寸與畫布尺寸不一致的情況。為了讓視頻按比例填充畫布,需要對視頻中的每一....
基于TI C6678+ Xilinx Zynq 7045的目標追蹤視覺方案
隨著現(xiàn)代科技的高速發(fā)展,機器視覺技術在無人機、安防監(jiān)控、工業(yè)檢測、ADAS高級駕駛輔助系統(tǒng)、醫(yī)療診斷....


淺述自適應顯著性的圖像分割(源碼開放)
本文介紹算法的源碼在github上給出 https://github.com/TimChinenov....
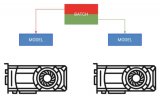
9個快速使用Pytorch訓練解決神經(jīng)網(wǎng)絡的技巧(附代碼
? ? 這份終極指南從簡單到復雜,一步步教你清除模型中所有的GP模型,直到你可以完成的大多數(shù)PITA....
激光三角測量方法在不同場景的應用
摘要: 在中國制造2025的大背景下,隨著智能制造與裝備、高新精密加工及工業(yè)物聯(lián)網(wǎng)技術的發(fā)展,對非接....
剖析CMOS圖像傳感器基礎知識和參數(shù)
CMOS圖像傳感器的工作原理:每一個 CMOS 像素都包括感光二極管(Photodiode)、浮動式....
一文詳解理解及設置白平衡
白平衡,字面上的理解是白色的平衡,白平衡是描述紅、綠、藍三基色混合生成后白色精確度的一項指標,是一個....

Halcon和Opencv這兩大圖像處理庫哪個更好
轉自 | 小白學視覺 ? OpenCV Halcon 開發(fā)語言 C++、C#(emgu)、Pytho....
淺析機器人認路的技術SLAM
SLAM (simultaneous localization and mapping),也稱為CM....

深度解讀嵌入式視覺的幾個典型應用
引言 如何做AI視覺應用的嵌入式部署分為硬件選型,軟件框架和優(yōu)化的選擇,模型算法的設計三大板塊。 A....

如何制作一個目標檢測的樣本圖像
來源丨h(huán)ttps://blog.csdn.net/MrSpart/article/details/1....
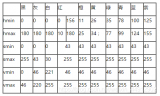
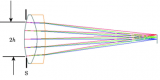
自己搭建三維成像傳感器中的一種
點云的獲取方式有多種,比如三維成像傳感器、Lidar激光探測與測量、逆向工程等。.. 對于尋常百姓家....


