DCDC芯片中的自舉電容是什么
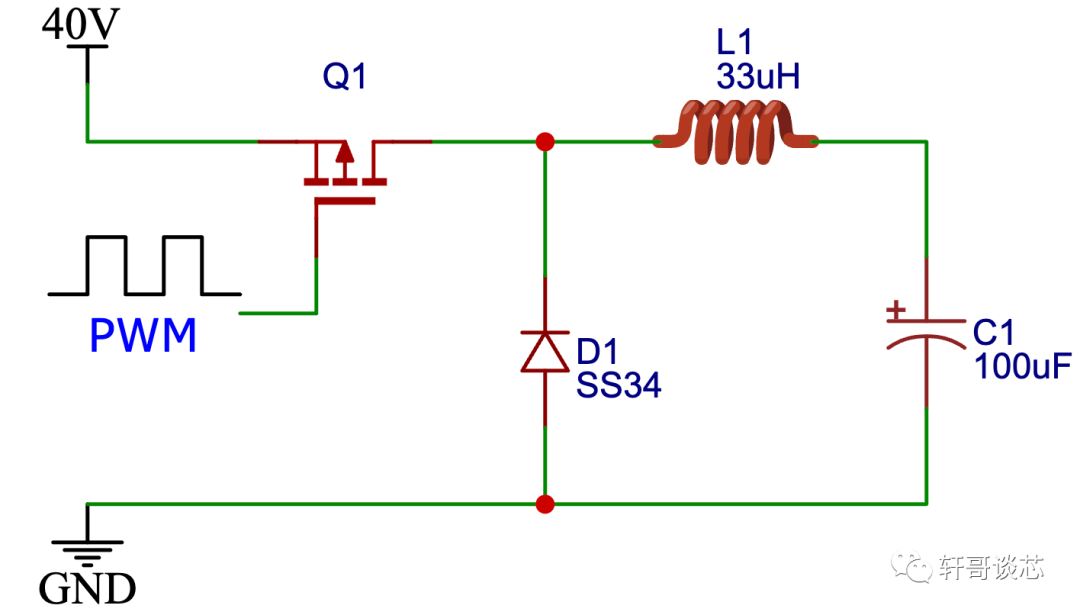
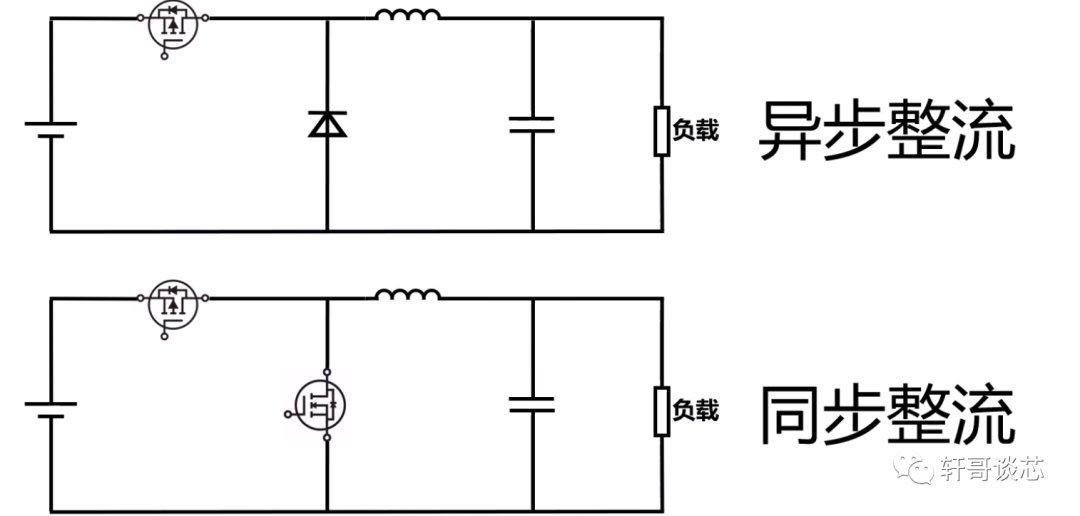
在以往的電子產(chǎn)品設(shè)計(jì)中,我經(jīng)常會(huì)選用到 DCDC 芯片,不過(guò)大部分情況下是基于 Buck拓?fù)涞模@主....
嵌套的結(jié)構(gòu)體 字節(jié)是如何對(duì)齊的
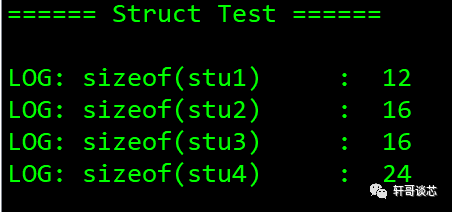
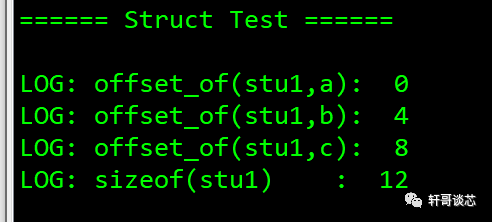
嵌套的結(jié)構(gòu)體,字節(jié)又是如何對(duì)齊的呢 先來(lái)看下面的代碼 typedef struct stu1 { c....
什么是結(jié)構(gòu)體的字節(jié)對(duì)齊現(xiàn)象
什么是結(jié)構(gòu)體的字節(jié)對(duì)齊現(xiàn)象 程序員,咱都用代碼說(shuō)話,先上 code: (說(shuō)明:以下代碼均在 ARM ....
大語(yǔ)言模型的兩種運(yùn)行方法
運(yùn)行 安裝上面的步驟,到這里就全部安裝好了,體驗(yàn)LLM有兩種方式,一個(gè)是直接在shell窗口中以聊天....
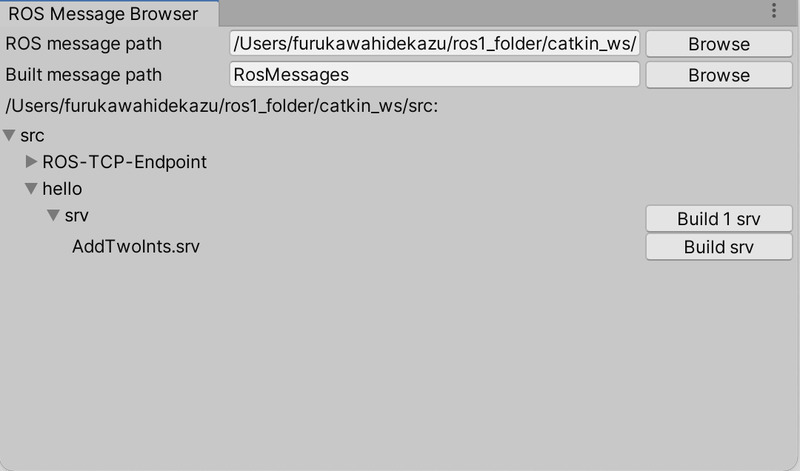
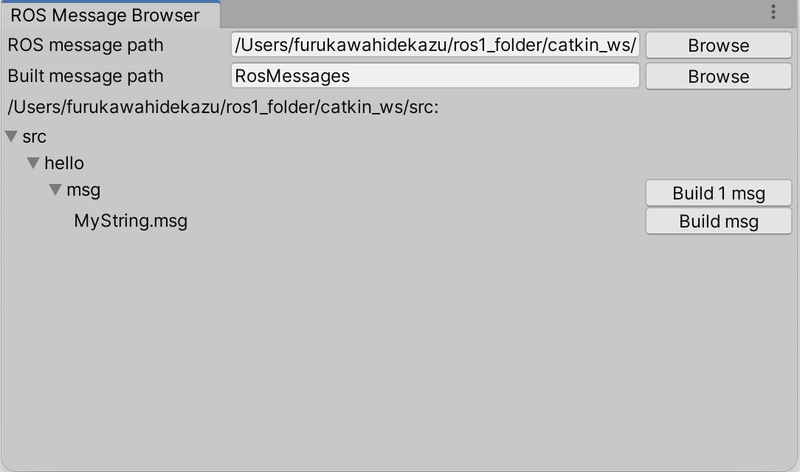
如何給OriginBot安裝大語(yǔ)言模型
一、安裝 1. OriginBot系統(tǒng)安裝 目前OriginBot系統(tǒng)有V1和V2兩個(gè)版本,只有V2....
IMU/GNSS與車體外參標(biāo)定
作為無(wú)人車以及智能機(jī)器人而言,在裝配過(guò)程中各個(gè)傳感器之間的外參標(biāo)定一直是比較頭疼的問(wèn)題。這里作者也系....

ROS與STM32串口通信代碼
這里以一個(gè)智能車代碼工程為例,抽取串口通信部分代碼 在頭文件中,進(jìn)行串口頭文件的包含 # inclu....
ROS主控如何創(chuàng)建設(shè)備別名
創(chuàng)建設(shè)備別名 需要?jiǎng)?chuàng)建設(shè)備別名原因: 在運(yùn)行一個(gè)ros程序的時(shí)候需要提供一個(gè)端口名,這個(gè)端口名一般是....

ROS主控與STM32的硬件連接和軟件設(shè)置
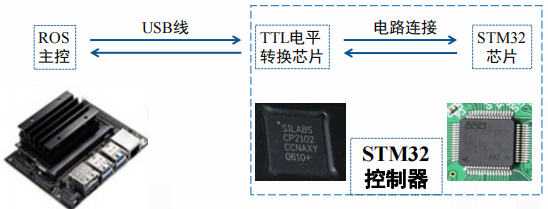
硬件連接 ROS主控通過(guò)usb線連接到一個(gè)TTL電平轉(zhuǎn)換芯片,再由這個(gè)電平轉(zhuǎn)換芯片連接STM32芯片....
智能車控制器功能介紹
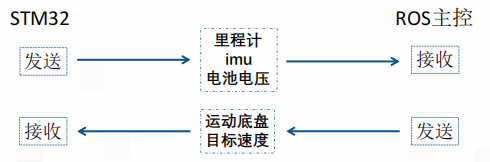
以簡(jiǎn)單的智能車為例,一般會(huì)存在兩個(gè)控制器,一個(gè)是運(yùn)行ROS的主控,另一個(gè)是運(yùn)行電機(jī)控制和傳感器信息采....
基于動(dòng)力學(xué)模型的機(jī)器人介紹
機(jī)器人具有高度非線性,強(qiáng)時(shí)變以及強(qiáng)耦合等動(dòng)力學(xué)特性,為了提高機(jī)器人控制的性能,研究人員提出了基于模型....

如何解決柔性機(jī)械臂建模過(guò)程問(wèn)題
柔性機(jī)械臂 剛性機(jī)械臂建模方法已經(jīng)可以有效地求解出機(jī)械臂各部分之間的耦合情況,但是對(duì)于柔性機(jī)械臂的動(dòng)....
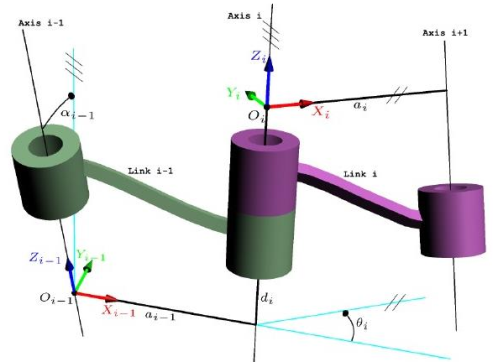
剛性機(jī)械臂的動(dòng)力學(xué)建模
剛性機(jī)械臂 機(jī)械臂建模是機(jī)械臂控制的基礎(chǔ),控制效果的好壞很大程度上決定于所建立的動(dòng)力學(xué)模型的準(zhǔn)確性。....
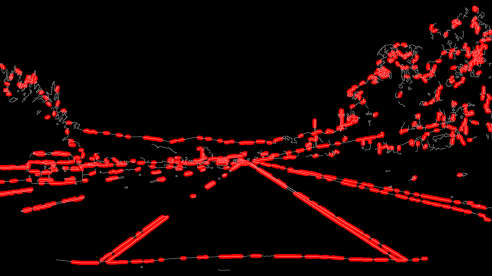
python中用Canny邊緣檢測(cè)和霍夫變實(shí)現(xiàn)車道線檢測(cè)方法
Canny邊緣檢測(cè)+霍夫變換 顏色閾值+圖像掩模的方法雖然簡(jiǎn)單,但是只能應(yīng)對(duì)一些固定顏色車道線的場(chǎng)景....
python中用區(qū)域掩模實(shí)現(xiàn)車道線檢測(cè)
1.顏色閾值+ 區(qū)域掩模 我們可以僅僅通過(guò)設(shè)置一些RGB通道閾值,來(lái)提取車道線。 以下的代碼設(shè)置了R....

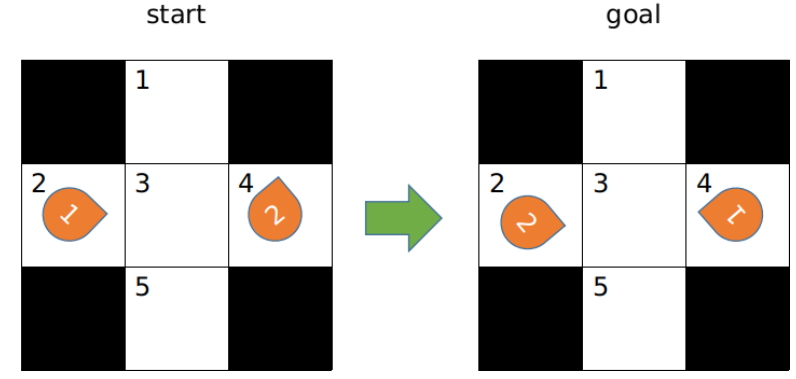
CBS多機(jī)器人路徑規(guī)劃實(shí)例講解
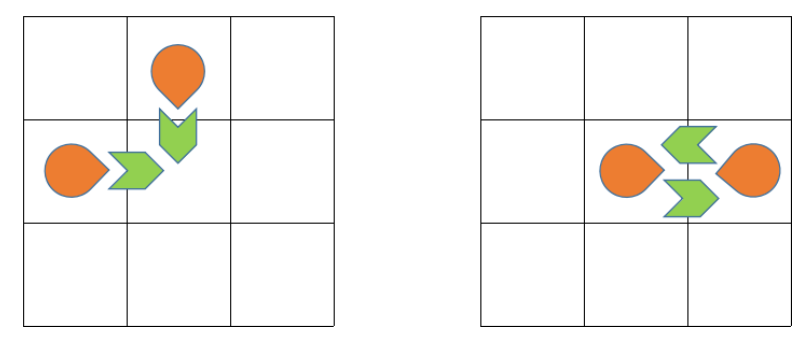
實(shí)例講解 以下將通過(guò)一個(gè)簡(jiǎn)單的實(shí)例講解CBS的基本過(guò)程,實(shí)例如圖2所示。 圖2 初始和目標(biāo)狀態(tài) CB....
CBS基本操作過(guò)程介紹
單個(gè)機(jī)器人通過(guò)路徑規(guī)劃、運(yùn)動(dòng)控制,能夠躲避環(huán)境中的障礙物,但會(huì)面臨一個(gè)嚴(yán)峻的問(wèn)題。當(dāng)一個(gè)場(chǎng)景中存在多....
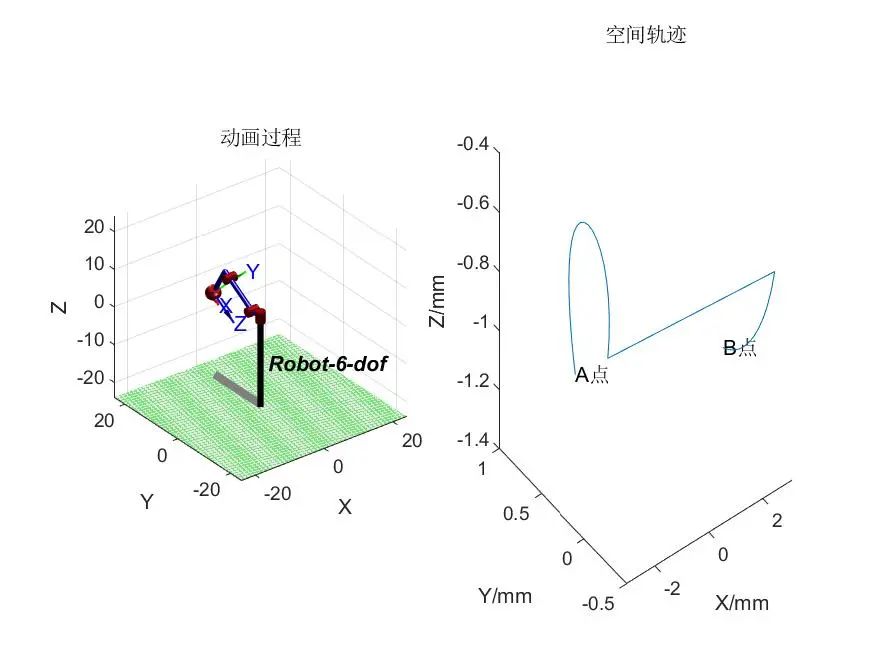
六自由度機(jī)械臂軌跡規(guī)劃仿真
采用五次多項(xiàng)式插值法進(jìn)行機(jī)械臂軌跡規(guī)劃,基于Matlab Robotics Toolbox平臺(tái)進(jìn)行關(guān)....
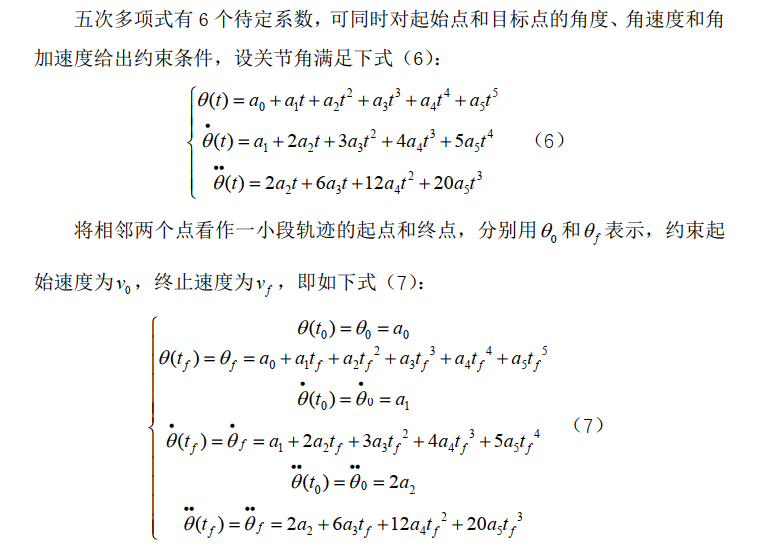
機(jī)械臂五次多項(xiàng)式插值法介紹
五次多項(xiàng)式插值法 五次多項(xiàng)式有6個(gè)待定系數(shù),可同時(shí)對(duì)起始點(diǎn)和目標(biāo)點(diǎn)的角度、角速度和角加速度給出約束條....
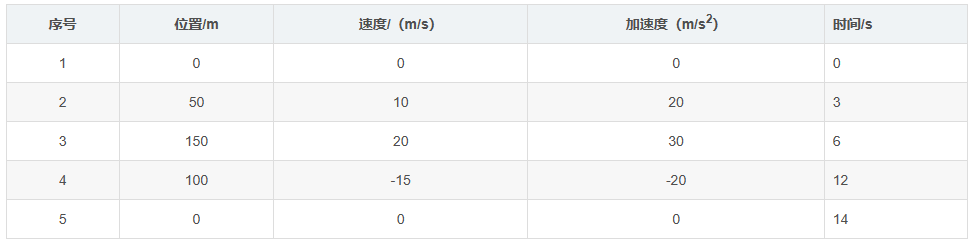
六自由度機(jī)械臂三次多項(xiàng)式插值法
對(duì)串聯(lián)機(jī)械臂而言,軌跡規(guī)劃可以分為:關(guān)節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃。關(guān)節(jié)空間軌跡規(guī)劃是把機(jī)器人....
機(jī)械臂結(jié)構(gòu)是什么樣的
該機(jī)械臂 6 個(gè)關(guān)節(jié)都是轉(zhuǎn)動(dòng)關(guān)節(jié),前 3 個(gè)關(guān)節(jié)確定手腕參考點(diǎn)的位置,后 3個(gè)關(guān)節(jié)確定手腕的方位。和....
四足機(jī)器人足端接觸檢測(cè)完整代碼
總體模型 將以上兩組單獨(dú)的測(cè)量結(jié)果疊加起來(lái),形成卡爾曼濾波器中使用的觀測(cè)向量。 同樣,每個(gè)度量的協(xié)方....
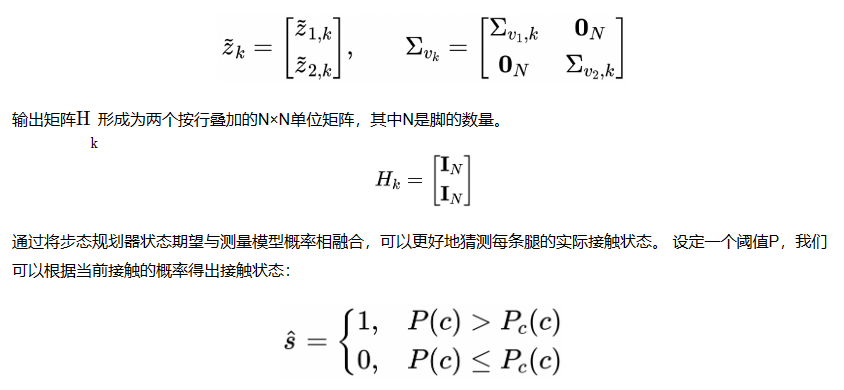
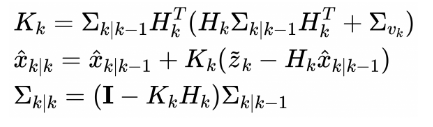
四足機(jī)器人測(cè)量模型介紹
測(cè)量模型(update模型) 預(yù)測(cè)模型中極有可能包含了規(guī)劃器所產(chǎn)生的誤差,因此,我們可以使用更多的測(cè)....
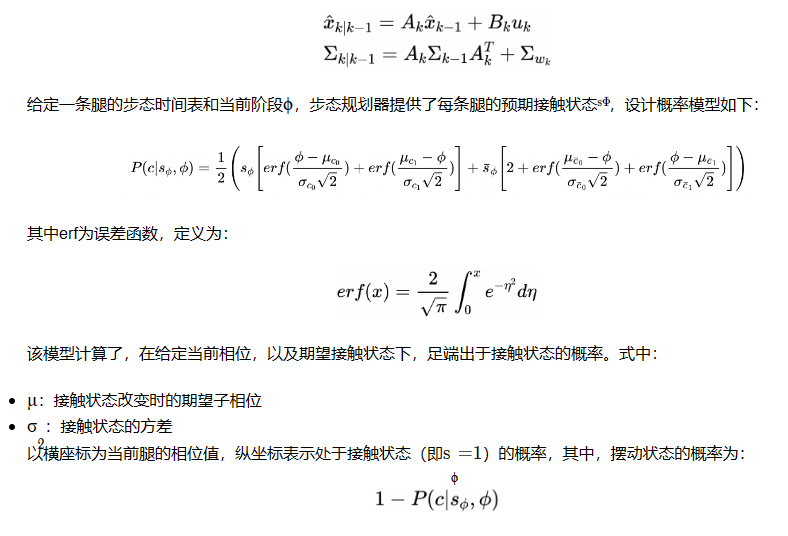
四足機(jī)器人接觸檢測(cè)和模型
接觸檢測(cè) 步態(tài)規(guī)劃器給出的接觸序列是嚴(yán)格按照時(shí)間進(jìn)行周期性計(jì)算的。而在實(shí)際運(yùn)行當(dāng)中,由于地形的不平整....
四足機(jī)器人的步態(tài)規(guī)劃測(cè)試代碼
步態(tài)規(guī)劃 因?yàn)槲覀兊乃淖銠C(jī)器人足端,是在不停地與地面接觸,懸空(擺動(dòng)),所以這里說(shuō)的步態(tài)規(guī)劃,其實(shí)指....